Research
Our research group aims at developing methodological and applied research in Artificial Intelligence, Machine Learning and data analysis for intelligent systems. The code of our project is available at https://github.com/Isla-lab
Safe Deep Reinforcement Learning for Autonomous Agents
In recent years, Deep Reinforcement Learning (RL) has emerged as a powerful technique to solve complex problems in a variety of applications, reaching and often outperforming classical algorithms and humans. Our research focuses mainly in novel RL methodologies that address the problem of safety, i.e., the application of RL solutions to problems and domains involving interaction with humans, hazardous situations and expensive hardware.

Click on the image to watch the video
Planning under uncertainty
The objective is to find the best possible action given data received from uncertain real sensors. An example is to decide the speed that a drone should maintain to make sure it will reach the end of a given path with enough battery, or avoiding obstacles. Possible techniques include Markov Decision Processes (MDPs), Partialy Observable MDPs, Monte Carlo methods, and the combination of RL and control techniques with data analysis.
Click on the image to watch the video
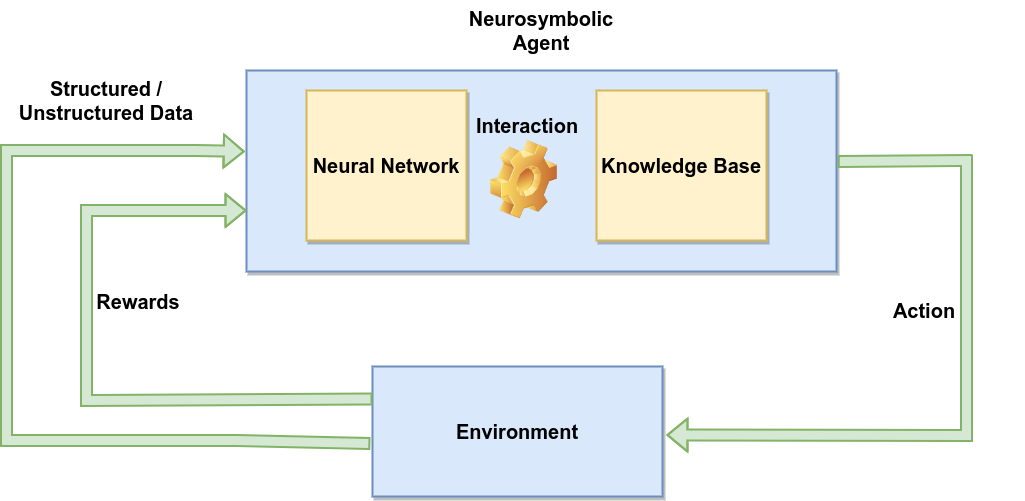
Neurosymbolic Decision Making
Deep RL is inherently stochastic, hence unreliable when deployed in safety-critical or human-centered settings. Conversely, classical symbolic AI allows to represent planning domains and constraints in a rigorous formalism with provable guarantees. The recent trend in AI is the combination between the two realms, that is NeuroSymbolic (NeSy) decision making. Research at ISLa focuses on the efficient combination of deep RL algorithms (e.g., DQN, PPO) with logic representation and planning in first-order and temporal logics, to embed safety and heuristic knowledge in learning agents.
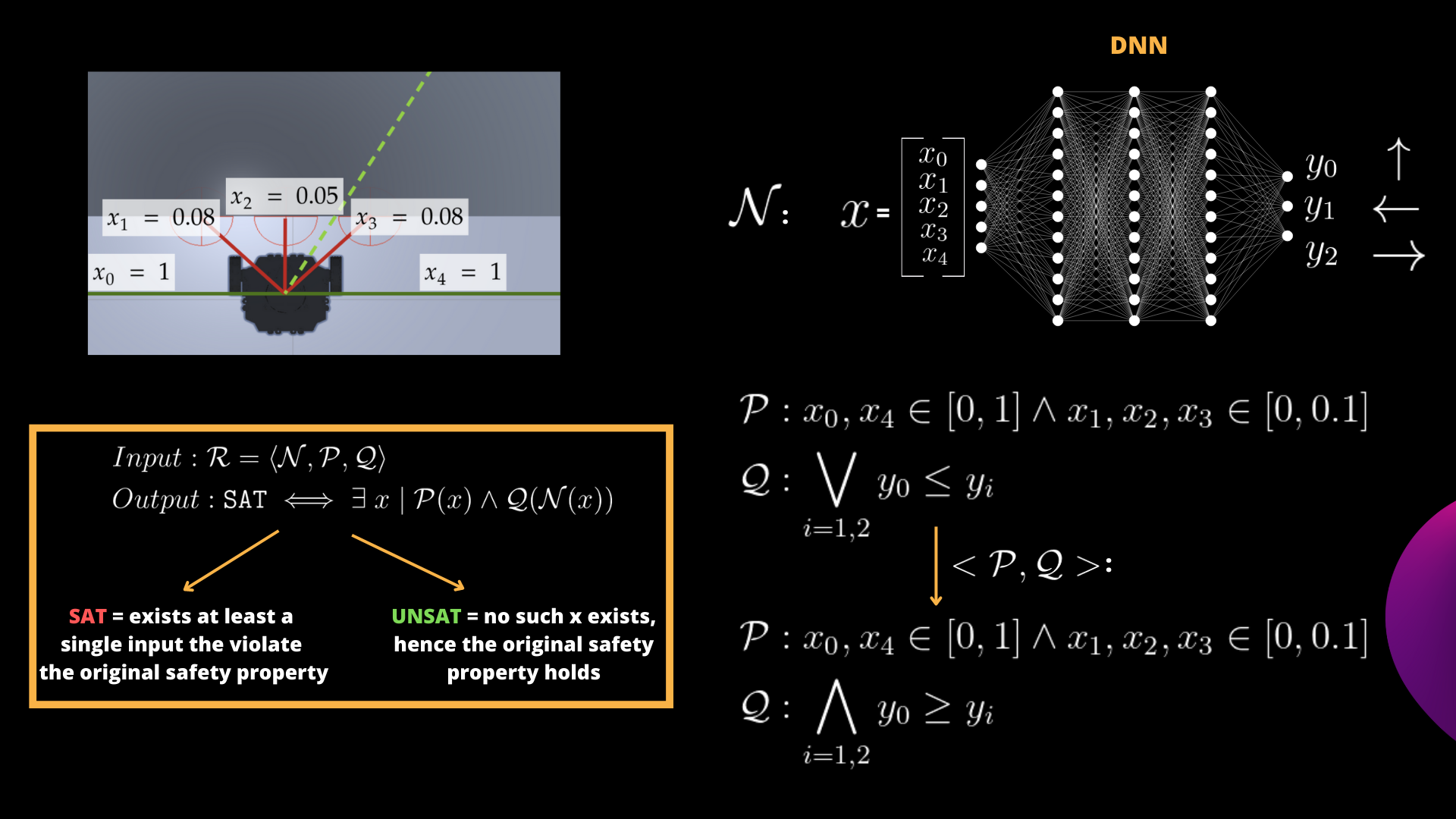
Formal Verification of Deep Neural Networks
DNNs have shown impressive performance in various tasks. However, the vulnerability of these models to adversarial inputs is a well-documented phenomenon observed across various applications. Formal Verification (FV) of DNNs uses mathematical methods to rigorously prove that a neural network meets certain safety and reliability requirements expressed as input-output relationships. Our research group is very active in this topic. We developed ProVe (Corsi et al. 2021) an interval propagation-based method and CountingProVe (Marzari, Corsi et al. 2023) a first randomized-approximated algorithm for the #DNN-Verification problem.
Multi-Agent Coordination
Implement and evaluate coordination approaches for Multi-agent systems. This includes Multi-Agent RL strategies (MARL) for adaptive planning under uncertainty, and Multi-Agent Path Finding (MAPF) for pre-planned synchronization (e.g., in logistics).
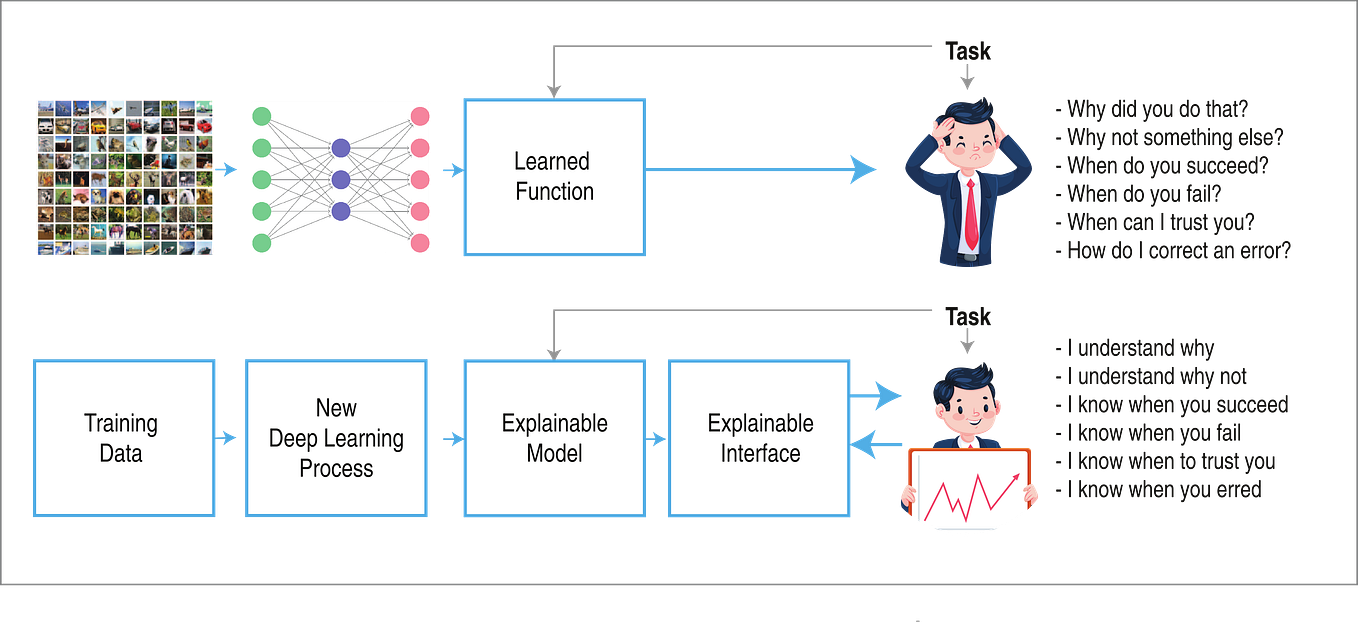
Advanced data analysis and Explainable AI
ISLa has strong experience in the analysis of large image and time series datasets, with advanced deep learning methods including transformers. One important focus of research regards Explainable AI (XAI), with the goal to provide trustable and interpretable predictions from large data and models. Techniques as causal discovery and hidden Markov models ensure robust performance and superior interpretability than classical deep learning techniques.
Main applications
Water Monitoring with autonomous robotic boats
Build and test various high level control and coordination techniques for autonomous robotic boats for monitoring water conditions in lakes and rivers. T

Click on the image to watch the video

Click on the image to watch the video
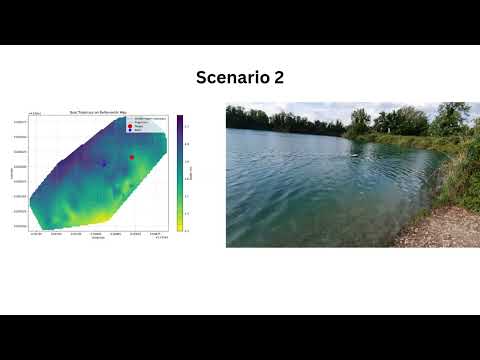
Click on the image to watch the video
Single and multi-robot terrain navigation

Click on the image to watch the video

Click on the image to watch the video
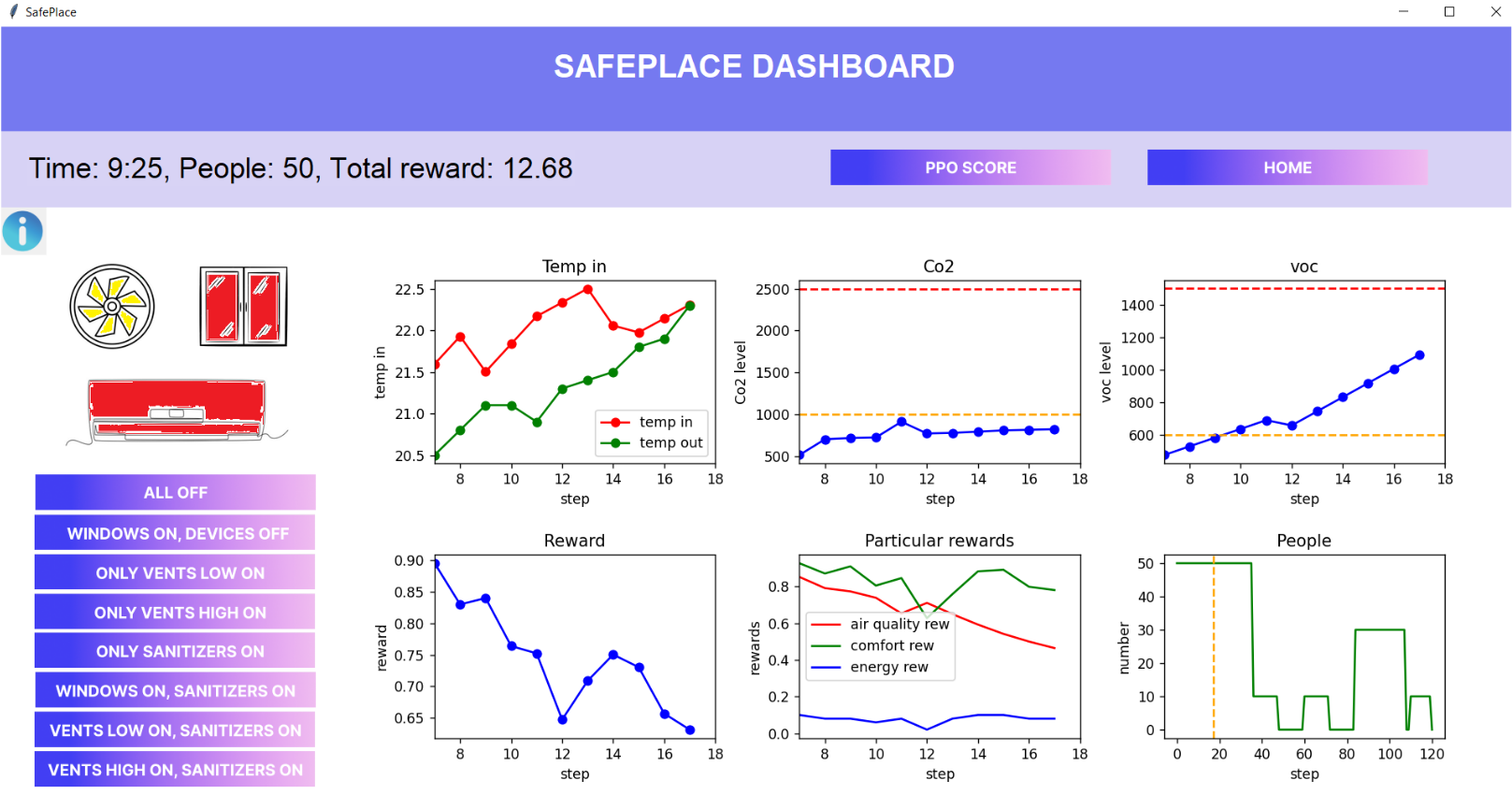
Adaptable Energy Management in Smart Buildings and Smart Grids
Buildings account for approximately 40% of final energy consumption and over one third of CO₂ emissions in the EU, while at the same time representing a largely underutilised source of flexibility for the energy system. The future decarbonisation objectives cannot be achieved by focusing solely on generation-side solutions, but require buildings to become active, adaptive and grid-interactive elements of the energy system. This research focuses on developing methodologies based primarily on reinforcement learning, autonomous planning under uncertainty, and time-series forecasting to reduce the energy, emissions and costs of smart buildings and smart grids. A strong focus is currently on the optimal usage of renewable energies.
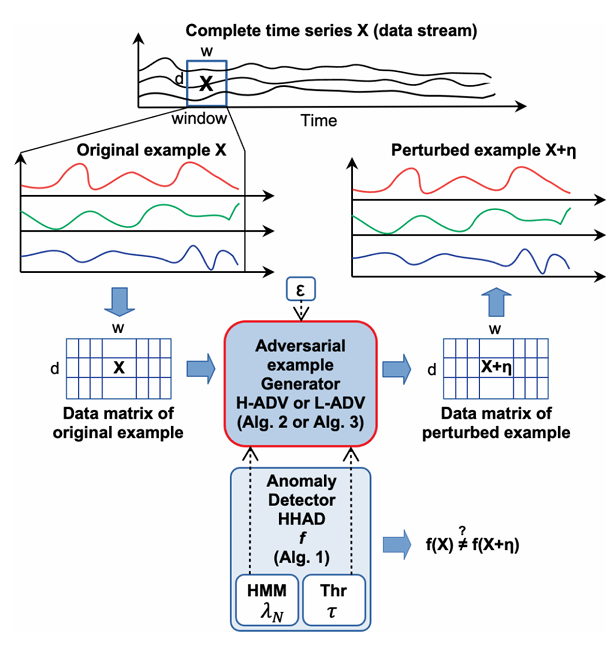
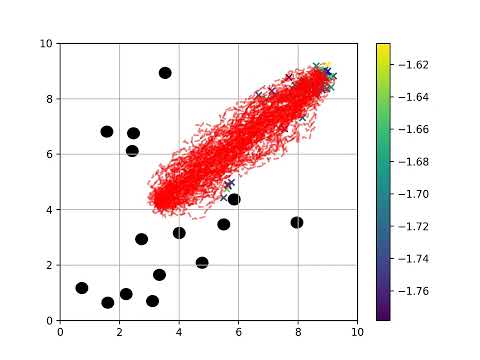
Explainable anomaly detection from industrial time series